偏航系统可以保证风电机组的叶轮始终处于正面迎风状态,从而能够以最大的效率利用风能,提高发电效率。
滑动式偏航机构可以承受更大的荷载,而且省去了刹车及液压装置,逐渐被兆瓦级风电机组采用。但是由于机舱的重力载荷较大、叶片的气动载荷受风随机性的影响而变化复杂,从而导致滑动式偏航系统的滑动块与大齿圈间的摩擦阻尼情况复杂,容易导致偏航减速机载荷过大或滑动块磨损等故障。某2MW风电机组出现了偏航大齿圈磨损严重、风电机组偏航减速箱内部轮齿折断现象。因此,为了保证风电机组运行的稳定性,需要对风电机组的偏航系统的动态特性进行研究。
对兆瓦级风电机组偏航系统的工作特性,从运动摩擦学原理进行考虑,分析偏航系统的振动特性 ;从偏航组件的力学强度特性角度考虑,研究偏航组件受载的强度特性和疲劳特性;还有基于偏航控制原理,建立了偏航控制模型,这些成果为研究兆瓦级风电机组偏航系统的工作特性做出了一些成果。
本文以某 2MW 风电机组出现偏航系统故障为背景,通过 Bladed 软件模拟出 22m/s 风速下,不同的偏航速度、偏航角度和有无湍流四种工况下的风载荷,将其以数据文件形式导入到不同工况下的偏航系统的 ADAMS 模型中,求解出相应的偏航总驱动力矩,并将得到的偏航总驱动力矩通过均等处理分配到偏航减速箱中,作为偏航减速箱的负载力矩输入,分析偏航角度、偏航速度和风速对偏航减速箱的力学特性影响。
滑动式偏航系统
滑动式偏航系统主要由机舱、偏航减速箱、偏航轴承、大齿圈、偏航小齿轮等组成。其偏航动作为 :电机驱动偏航减速箱,带动偏航小齿轮运动,偏航小齿轮与固定在塔架上的大齿圈相互啮合,在滑动式偏航轴承作用下,机舱开始缓慢绕塔架中心旋转,实现偏航动作。
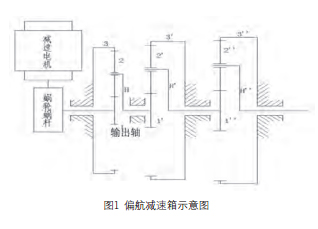
一、偏航减速箱模型
偏航减速箱的主要作用是增大减速箱输出端转矩,驱动机舱缓慢平稳的偏航。该减速箱采用一级涡轮蜗杆机构和三个 NGW 式行星轮系串联的减速机构。图 1 是偏航减速箱的示意图。
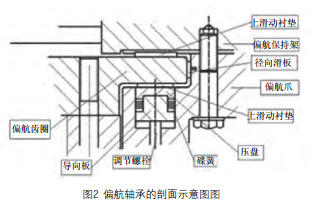
二、滑动式偏航轴承模型
滑动式偏航轴承的主要作用就是维持偏航摩擦,保证偏航稳定性。与偏航大齿圈上表面贴合的 8 块下滑动衬垫,
内侧面贴合的8块径向滑板,下表面贴合的八块上滑动衬垫,即为偏航轴承的主要摩擦和润滑部件,它们都是由具有自润滑功能的 PETP 材料制成,此种 PETP 材料的静摩擦系数为0.1,动摩擦系数为0.06。图2偏航轴承的剖面示意图。
偏航系统的动力学模型
本文采用 ADAMS 软件构建偏航系统的动力学仿真模型,求出不同工况下偏航驱动力矩,进而分析偏航减速箱
中行星轮系间碰撞力的动态特性。
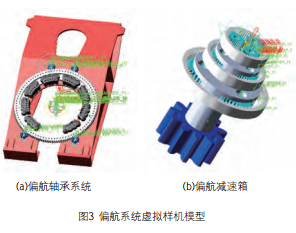
一、虚拟样机模型建立
在 Solidworks 软件中首先建立出偏航轴承系统和偏航减速箱装配体的三维模型,根据对偏航工作原理的分析,为了减小模型运行时间,提高计算效率,在对偏航系统进行动力学分析的时候,将偏航轴承和机舱部分与偏航减速箱分开计算。
对于偏航轴承系统 :偏航大齿圈与大地建立固定副约束 ;四个偏航小齿轮分别与机舱上的定位孔建立旋转副约束 ;上滑动衬垫、下滑动衬垫分别与偏航大齿圈之间建立旋转副约束,并各自定义摩擦 ;径向滑板与偏航大齿圈内侧面建立定义接触,与机舱建立固定副约束 ;四个偏航小齿轮分别与大齿圈之间添加接触 ;径向滑板与大齿圈内测面添加接触。对于偏航减速箱 :三个外齿圈分别与大地之间建立固定副约束 ;一级太阳轮与一级行星架间建立旋转副约束 ;三个一级行星轮分别与一级行星架间建立旋转副约束;一级行星架与一级外齿圈之间建立旋转副约束 ;下一级太阳轮与上一级行星架之间建立固定约束保证行星轮系运动的传递,其余约束与第一级行星轮系的约束相同 ;每个齿轮之间均定义接触。图 3 为添加完约束后的偏航轴承系统和偏航减速箱的虚拟样机模型。
二、载荷模型
对于风电机组偏航来说,主要的偏航阻力来自于两方面,由叶片传递到机舱上的风载荷作用,其中该风载荷对偏航的阻力矩的直接表现为逆偏航方向的阻力矩 ;由于机舱自重、风载荷垂直机舱的作用力、风载荷对机舱的倾覆力矩而导致上滑动衬垫、下滑动衬垫和径向滑板与偏航大齿圈和机舱间偏航时产生的摩擦力矩。
(一) 风载荷
依据 IEC61400 - 3 标准,选用风谱 kaimal 模型模拟风速,湍流强度为 C,工况如表 1 所示。通过 Bladed 软件仿真出不同工况下的风载荷,机舱的倾覆力矩 Mx、My,偏航力矩 Mz,垂直载荷 Fz,水平荷载Fx、Fy。载荷作用坐标系如图 4 所示。


(二)摩擦阻力矩
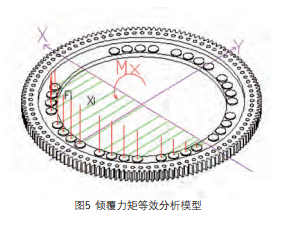
动衬垫上的正压力发生变化,因此会导致其产生的摩擦阻力矩发生变化。本文借鉴倾覆力矩对螺栓组拉力的求解方法对倾覆力矩 Mx、My 进行等效处理。如图 5 所示,当倾覆力矩 Mx 作用时,会对 X 轴两侧的摩擦片正压力产生影响,在图 5 的情况下,会导致 X 轴左边的下滑动衬垫受压,X轴右边的上滑动衬垫受压,对于下滑动衬垫,设每个下滑动衬垫受倾覆力矩作用产生的压力为 Fi,作用点到 X 轴距离为 Xi,则有 :
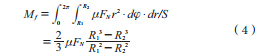
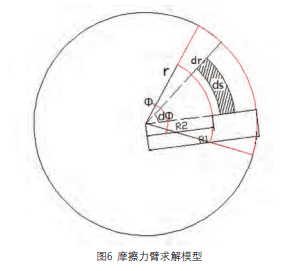
同理可以得到 My 的等效压力以及上滑动衬垫受到的倾覆力矩作用产生的压力。将偏航模型简化为一个在水平面上定轴转动的圆台,则每个摩擦片可简化为如图 6 的扇形块,R1 和 R2 分别为摩擦片的外径和内径,Φ 为张角,在摩擦片上取一微段 dΦ,长度为 dr,则摩擦力矩 :

因此,摩擦力臂的等效长度为
(三)接触刚度
减速机齿轮接触力是基于 IMPACT 函数的接触模式,接触碰撞模型以 Hertz 弹性撞击理论分析为基础定义的,接触刚度系数 K 主要和碰撞物体的结构形状和材料有关。


式中,其中 ρ1、ρ2 为两碰撞物体的当量半径 ;,其中,μ1、μ2 分别是两个齿轮材料的泊松比,E1、E2 分别是两个齿轮材料的杨氏模量。本文齿轮材料均选用 20Cr2Ni4 材料,其泊松比为0.29,弹性模量为 2.07×105MPa。各对齿轮间啮合刚度值如表 2。
结果讨论
设置各工况仿真参数,摩擦片的动摩擦因数为 0.06,静摩擦因数为 0.1,采用 Step 函数设置驱动,在 ADAMS中进行动力学仿真。
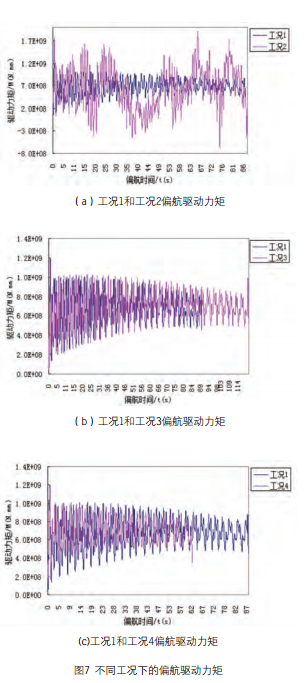
一、偏航驱动力矩
从图 7 中各工况下偏航驱动力矩的对比中可以看出,由于工况 2 为湍流等级为 C 级的湍流风,而工况 1 为普通阵风,从图 7a 可明显看到偏航总驱动力矩的波动情况,可见湍流风对风电机组偏航总驱动力矩影响很大。工况 1、工况 3 和工况 4 的偏航驱动力矩幅值基本是相同的,但由于工况 3 偏航速度较小,在偏航开始时刻工况 3 偏航驱动力矩较小。不同的偏航速度(图 7b)和不同的偏航角度(图7c)下,偏航所需时间是不同的。
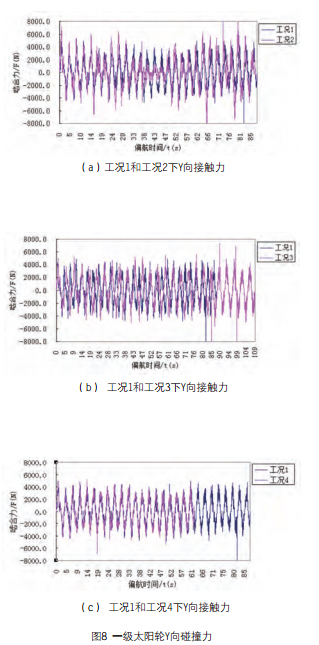
二、减速箱一级太阳轮接触力
从图 8 可以看出,齿轮碰撞力有明显的周期性,其变化频率与减速箱驱动转速有关,从图 8a、8c 可以看到,虽然碰撞力幅值不同,但是时域上基本上是重合的,因为其驱动转速是相同的,但是图 8b 中,碰撞力的时域上有明显的差异,可见工况 1 的碰撞力变化比工况 3 碰撞力变化快,即驱动转速越大,碰撞力变化越急,所以驱动转速会影响碰撞力的变化频率。从幅值看,图 8a 工况 2 下碰撞力的幅值明显较大,因为湍流风风速随机变化,导致偏航系统的负载出现幅值大范围波动。
结语
本文在考虑风载荷和偏航摩擦阻力矩的影响下,建立滑动式轴承风电机组偏航系统及偏航驱动偏航减速机工作过程的动力学模型,并基于 ADAMS 软件对构建的动力学模型进行仿真分析。结果表明 :
(1)从分析结果来看,对于风电机组偏航系统来说,影响最大的因素是风况,在阵风情况下,偏航系统的驱动转矩幅值波动均匀,影响不大,但是在湍流风况下,偏航系统的驱动转矩却出现很大的波动。
(2)从一级太阳轮 Y 向碰撞力的变化情况来看,湍流风对其幅值影响很大,较其它三种工况,其幅值波动情况更加不稳定,且最大值明显大于其它三种工况,这对减速箱实际工作来说,会使减速箱受到更大的负载,增加齿轮的破坏机率 ;对偏航系统来说,偏航角度对偏航驱动转矩和减速箱齿轮碰撞力的影响较小。
(3)在同等风况下,不同偏航参数的偏航运行时,偏航系统内部控制器可以实现调节偏航驱动转矩的作用,使之受载更加均匀稳定。